
In simple terms – the servo drive tells the motor what to do, when to do it and how to do it in precise detail.
A servo drive is a basic element of a motion control system which also includes a servo motor, controller, and feedback element. Servo drives take a command signal for position, velocity or current and adjust the voltage and current applied to the servomotor based on closed-loop feedback.
Note that servo drives are also sometimes called amplifiers because they take the control signal from the controller and amplify it to deliver a specific amount of voltage and current to the motor.
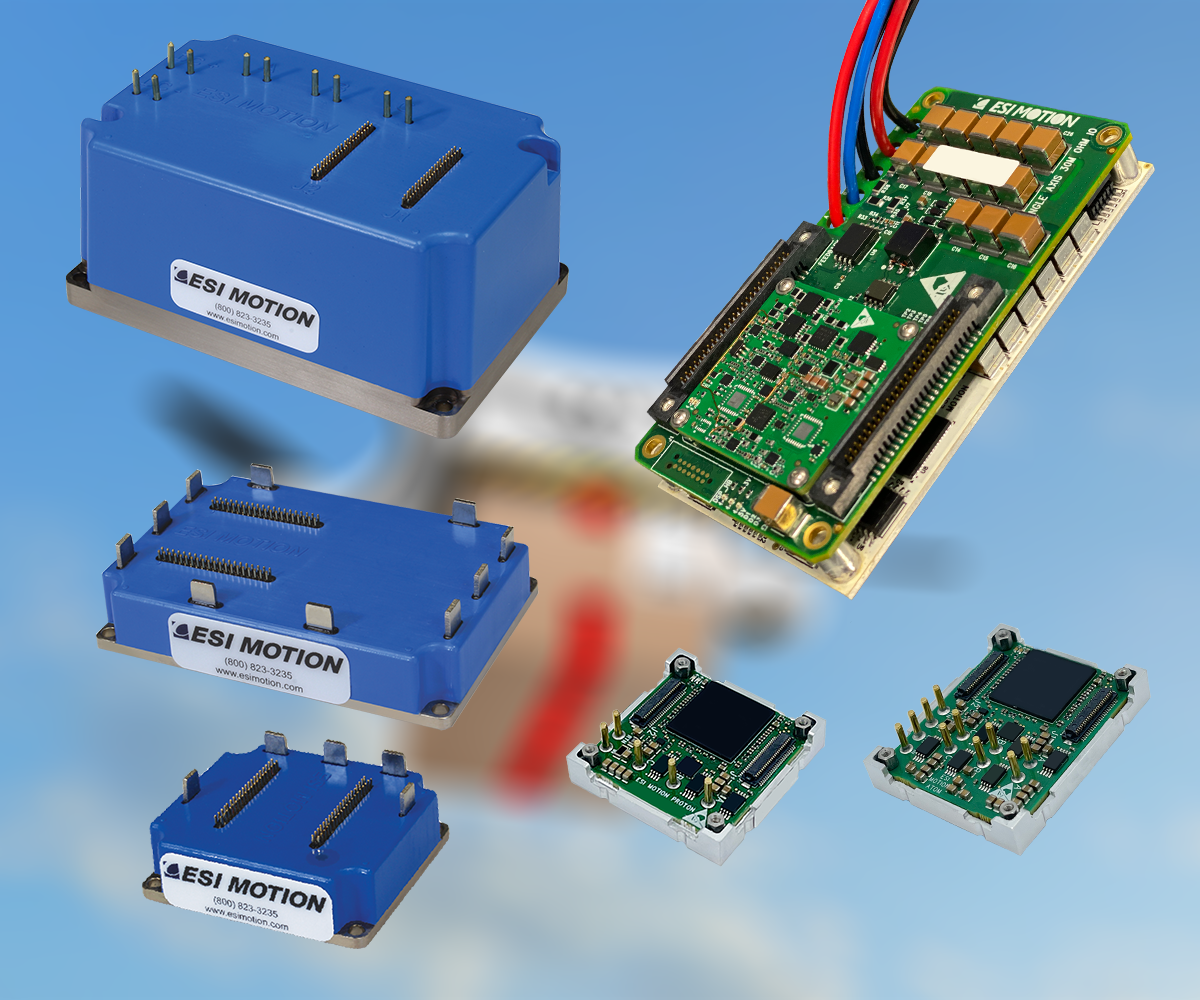
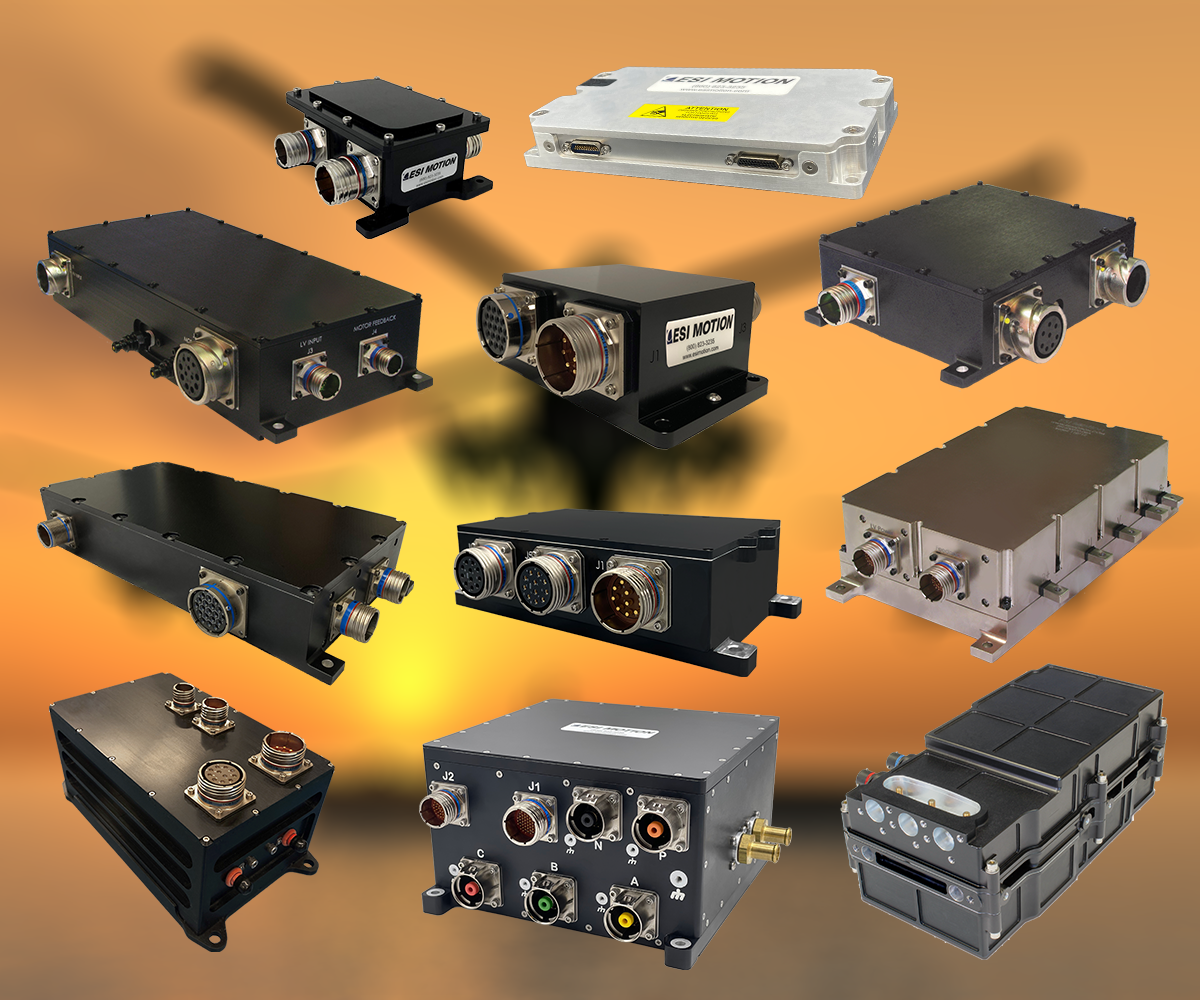
ESI Motion has servo drive modules and servo drives to fit your application! Contact Us


Servo Systems consist of four main components; a motor, a drive, a controller and a feedback device. The controller determines what the motor needs to do and then triggers the drive to send the instructions, or necessary electrical energy, to the motor to make it move accordingly.
The controller is responsible for calculating the path or trajectory required and sends the command signals to the drive.
The drive then sends the necessary voltage and current to the motor to achieve required motion.
Servo drives can control torque, velocity or position. With ESI Motion’s Graphical User Interface (GUI) & HiDS software the user can set the required parameters themselves and make adjustments as needed.
A common variation is the torque-mode amplifier. These convert the command signal from the controller into a specific amount of current to the motor. Because current is directly proportional to torque, the drive is controlling the amount of torque that the motor produces.
A linear drive (in which current is proportional to force) there’s direct control of the motor’s force output.
Servo-motor torque is directly related to current:
T = KT x I
T = Torque
KT = Motor Constant
I = Current

As the brains of the system, the job of the controller is to take information from the feedback device and send the appropriate voltage signals to the drive.
The drive acts as the nervous system and sends the necessary amount of current to the motor. This process of reading and responding to feedback makes the system closed loop, which is the defining characteristic of a servo system.
One of the most important tools for sizing a servo motor is its torque-speed curve, but often the torque-speed curve is specific to a certain motor-drive combination.
The continuous and peak torque capabilities of the motor are affected by the thermal properties of both the motor and the drive. If there are any inefficiencies in the motor it will cause it to product heat, which can degrade bearing lubrication and insulation around the windings.
Excessive heat which is typically caused by running a motor above its peak torque, can demagnetize the motor’s magnets.
Although the drive itself has no moving parts, heat can still damage it power transistors.
The torque-speed curve of a servo motor is often based on a specific motor-drive combination.
Note that continuous torque is the amount of torque the motor can produce indefinitely. Peak, or intermittent, torque is the maximum amount of torque the motor can produce, but peak torque can only be sustained for a short amount of time before overheating occurs.
